隨著全球衛星定位系統(Global Positioning System, GPS)的普及,GPS的觸角已悄悄進入日常生活中。車輛路線導航以及提升行車安全,皆為全球定位系統相當廣泛的應用。基於近年來車載資通訊(Telematics)技術的快速發展,車用環境無線存取(WAVE)/專用短程通訊(DSRC)的車間通訊技術,可提供車輛與車輛(Vehicle to Vehicle, V2V)、車輛與路側(Vehicle to Roadside, V2R)之間毋須事先建立連線即可快速交換資訊的功能。
本文將介紹一種利用協同式車間通訊輔助定位修正技術,其將不同車輛收到的GPS封包拿來校正自身的位置,同時整合車內外感測元件,可大幅改善定位的精準度。
定位誤差在所難免 校正工作有其需要
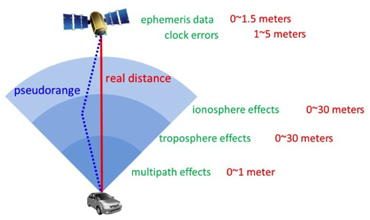 |
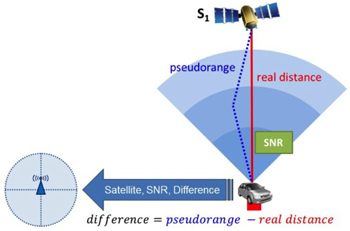
| 圖1 GPS訊號造成距離誤差來源 |
在沒有任何校正情形下,GPS的誤差大約在10~15公尺(m),其主要來自三個部分。
第一部分是由衛星傳送端所造成的誤差,如軌道誤差來自實際衛星位置與地面站預期不同所造成的偏差;而時鐘誤差,即便現在用石英鐘校時,仍然存在衛星間時鐘的偏差;選擇性誤差(Selective Availability, SA)效應則是在2000年後,因美國國防部取消亂碼干擾後停止。
第二部分是傳送頻道的誤差,來自電離層延遲和對流層延遲等水氣和游離電子的干擾。
第三部分是接收端環境造成多路徑效應、本身接收器到晶片的內部雜訊,以及接收端的時鐘
誤差等影響。以上誤差都會造成傳送路徑改變,增加不定的誤差量(圖1)。
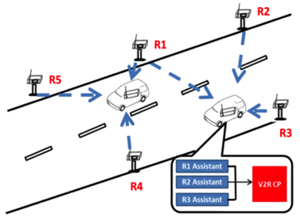 |
| 圖2 V2R車間通訊輔助衛星定位修正 |
車間通訊輔助衛星定位修正可以分為V2R和V2V兩大類,如圖2與圖3所示。前者利用路側設備提早告知車輛接下來行駛過程中所需之定位誤差修正值,後者利用鄰近車輛分享彼此之定位誤差修正值以及車上感測元件(如雷達或影像鏡頭)量測之車間相對位置來調整自身的定位誤差。
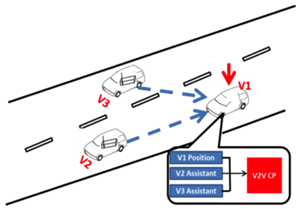 |
| 圖3 V2V車間通訊輔助衛星定位修正 |
V2R車間通訊輔助衛星定位修正較為普遍的方法,是差分式全球衛星定位系統,其使用經過精準測量之確切位置設立一個參考站,因為參考站的確切位置為已知,所以可以計算出其與根據衛星定位訊號測量所得位置的偏差量。將此偏移量資料利用路側設備傳送給鄰近車輛,鄰近車輛即可利用此偏移量資料修正自身衛星定位誤差。
緊密結合車間通訊定位準度明顯提升
當車輛經過路側設備通訊範圍內,並進行自身衛星定位誤差修正後,可以獲得一個較為精準的衛星定位結果,此結果將可利用為慣性導航的初始值,以維持一定時間周期內的衛星定位精準度。
V2R車間通訊輔助衛星定位修正受限於路側設備與參考站的架設數量,在路側設備通訊範圍外,則可以利用V2V車間通訊輔助進行定位修正,透過車間相對位置實現更精準的定位功能,即為V2V車間通訊輔助衛星定位修正之重要精神。
目前車輛藉由搭配雷達或影像鏡頭,以進行車間防碰撞警示技術已經相當成熟,自身車輛可以透過雷達或影像鏡頭獲得與鄰近車輛彼此的距離與角度等資訊。但是要用來進行V2V車間通訊輔助衛星定位修正,則尚有周遭車輛識別問題須要先克服。
車間通訊可以輔助傳統車牌辨識方法,因為道路上鄰近行駛車輛數目有限,而每一輛車都具有車間通訊設備,故可收集到鄰近車輛的車牌號碼,透過影像鏡頭取得車牌畫面,經由車牌比對選擇誤差最小、號碼最接近的車牌號碼做為車輛識別,進而獲得鄰近車輛彼此之距離與角度資訊。每輛車輛除週期性廣播車牌號碼外,更包括當下自身衛星定位或衛星定位誤差等資訊,鄰近車輛即可利用上述資訊與鄰近車輛彼此間的距離與角度,進行自身衛星定位修正。
協同式車間通訊輔助定位受矚目
整個定位校正系統包含三個部分,一為無線射頻辨識(RFID)系統,二為車上短距無線通訊單元,三為路側短距無線通訊單元。
無線射頻辨識系統包含區域內的標籤和車上的讀取器,無線射頻標籤提供此點百分百精準的經緯度資訊,而每當移動車輛上的無線射頻讀取器讀取到標籤時,此時車輛即有最精準的經緯度位置資訊。
車輛上的短距無線通訊單元用來與區域內其他車輛的車上單元及路側單元通訊,此裝置具有定位晶片可以接收衛星傳來的訊號,以及處理從GPS接收器接收之美國國家航海電子協會(National Marine Electronics Association, NMEA)封包的能力。路側短距無線通訊單元收集區域內車上單元傳來的資料再把校正值傳出去給同區域其他車輛。
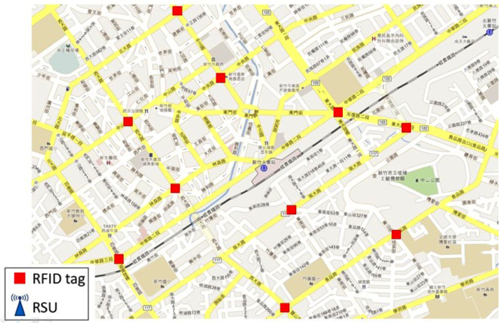 |
| 圖4 協同式車間定位系統環境建置 |
如圖4所示,深色方形圖示代表無線射頻辨識系統內的標籤,區域內會不定時有車輛經過標
籤,車輛上無線射頻讀取器更新經緯度位置;而當車輛通過深色方形圖示,無線射頻讀取器即可將此時車輛的最新經緯度位置更新為讀取到的經緯度。
根據NMEA所定義GPS接收器接收到衛星訊號的封包含完整位置資訊、經度、緯度、高度、時間、速度、方向、可視衛星編號以及衛星訊號強度。所有的資訊皆可在不同的NMEA格式中取得,例如GPGGA每秒更新十次即時經緯度位置、GPGSA紀錄定位所使用的GPS衛星編號。根據使用的衛星編號,可從GPGSV得知此次定位用之衛星群組的訊號強度。
 |
| 圖5 車輛讀取無線射頻標籤後與路側單元通訊 |
無線射頻辨識到RFID標籤,取得最精確經緯度位置並計算與各衛星真實距離,同時將此時此衛星的訊號強度訊噪比(Signal-to-Noise Ratio, SNR)傳到路側單元上(圖5),路側單元會不斷地收到通過無線射頻辨識標籤的車輛傳來的訊息,並將此訊息整理過後廣播出去,讓其他還沒通過無線射頻辨識標籤的車使用此定位校正量。
過去定位的精準度取決於與虛擬觀測站的距離,與虛擬觀測站越近,透過該虛擬觀測站的虛擬觀測修正量,所計算出來的定位準確度越高。不過,在移動狀態下,如果每輛車輛都必須頻繁地以目前的GPS初值向系統查詢,才能取得虛擬觀測修正量,不僅通訊成本昂貴,而且會造成系統處理的負擔。
以衛星訊噪比進行定位校正
 |
| 圖6 路側單元通訊廣播範圍 |
透過車間通訊,利用路側單元與車上單元通訊取得其餘方位使用者傳來的虛擬觀測座標及虛擬觀測修正量進行定位校正(圖6)。
當車輛收到來自路側單元的校正訊息後,根據自身的經緯度及當下收到的衛星SNR,利用從路側單元傳來的校正衛星組反推出自己與用來定位衛星的真實距離差,如公式1所示。
......................................................公式1
由於自身車輛的經緯度座標是不準確,因此本身與衛星的距離是錯誤的,存在一個誤差,如公式2所示。
......................................................公式2
路側單元建置在高交通流量的十字路口,區域內的射頻辨識標籤及移動車輛分別為和。車輛用來定位的衛星組合及衛星之訊號強度及SNR分別為和。
路側單元不斷地廣播通過無線射頻辨識系統車輛的校正資訊,包含與衛星的真實距離差並依據SNR權重產生自己新的距離差。
權重的方法以同顆衛星收到SNR差距絕對值之倒數,做為比例關係來算出與該顆衛星的距離誤差,並用來推算出校正過的衛星距離。如果收到超過四顆衛星的資料,則可用來計算出最終校正過的經緯度位置。
校正實驗步驟及分析
 |
| 圖7 動態定位校正實驗場域布建圖 |
本文案例進行動態定位校正實驗的地點選在新竹南寮,實驗前先以RTK天線沿著道路線靜態量測九個參考點,此九個點以內插方式繪出此區域精準的經緯度位置,此位置資訊即本次動態定位校正實驗所參考的絕對正確位置,位置如圖7所示。
同時架設兩個無線射頻辨識標籤於道路遠端的左右兩側,實驗中將不斷地有來車經過無線射頻標籤並傳送本身校正資訊給路側單元,路側單元則會不斷廣播收集到最新校正量給行駛於此區域的車輛。
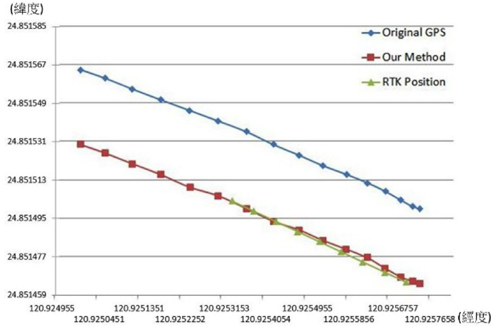 |
| 圖8 動態定位校正效能分析圖 |
動態定位效能如圖8所示,(3)是以九個RTK精準點內插法繪出之道路線經緯度,當作絕對正確的參考位置。實驗過程中,待校正車輛行駛於此事先標好的道路線,(1)即為原始GPS輸出的經緯度值。路側單元即時地把位於道路兩端經過無線射頻標籤的車輛校正量廣播給行駛的待測車輛,待測車輛上的通訊設備依據收到校正量及本身GPS接收器接收的NMEA封包解算出校正過後的經緯度位置,以(2)表示。圖8中X/Y軸座標間隔換算為距離,分別是X軸座標間隔10公尺,Y軸座標間隔2公尺。由此可以觀察到,校正過後的(2)相當趨近於以RTK天線量測的(3)。
車間通訊協同定位前景看好
定位技術是車載安全相關應用的基礎,但現今的定位系統普遍存在著定位誤差的問題,雖然VBS-RTK可以在靜態環境下提供極佳的定位準確性,相當適合 用於田野調查、地質考察等需要長時間安定度高的定位測試領域,但是在動態移動的環境下卻存在著通訊量太大以及系統負擔過重等問題。因此,利用車間通訊達到協同式定位,可有效降低車載通訊系統持續向中控中心連線,並減輕其造成的網路負擔。
本文提出一個藉由車間通訊讓區域內彼此車輛定位誤差縮小的方法,同時可讓定位精準度達到車載安全應用的要求。透過RFID讓移動中的車輛取得瞬間的精準位置,藉此計算定位校正值,再利用WAVE/DSRC車間通訊技術,藉由路側單元使用短距無線通訊廣播定位校正值,移動車輛收到後,進行定位運算。定位校正量取決於不同車輛收到同顆衛星SNR及其虛擬距離差,實驗以RTK天線做為參考位置,動態定位校正結果可以把誤差修正到1公尺以內,甚至與參考位置沒有差異。
(本文作者皆任職於工研院資通所)