Robotaxi在美中對抗的背景下加速發展,預計將全面帶動車輛自駕化層級,同時提升車輛智慧化與環境智慧化,能有效提升自駕層級,帶動背後數以兆計的龐大商機。
幾年前自駕車成為繼智慧手機之後最被看好的資通訊裝置,車輛電氣化所帶動的商機,將成為資通訊產業的新藍海,然而幾年下來,車輛智慧化與環境智慧化都遭遇相當程度的瓶頸,2024年傳統車廠更是遭遇逆風,部分歐洲車廠傳出關廠裁員消息,為汽車產業的未來蒙上一層陰影。
另一方面,在經過數年的紙上談兵與數百萬英哩的道路測試之後,幾個無人駕駛廠商加速商業化的布局,包括美國的Waymo、AutoX、特斯拉(Tesla);中國的百度等,都已經陸續實現自駕車商業化。根據產業研究機構Frost&Sullivan的預測,到2030年,中國的Robotaxi市場規模將達到人民幣4,888億元,而全球市場規模則將達到人民幣8,349億元。充分表明,Robotaxi市場的潛力巨大,未來將成為帶動經濟發展的重點產業。
Robotaxi引領無人車夢想
2024年10月,Tesla創辦人Elon Musk在為人們造夢的華納兄弟電影製片廠舉辦「We,Robot」發表會,發表Robotaxi全新產品Cybercab正式取消方向盤與油門、煞車等踏板。最終下車走上舞台的馬斯克強調:有朝一日,特斯拉的車主們能夠以自己的車輛提供計程車服務,帶其他人四處移動,將每輛車的效用提高5~10倍。自動駕駛汽車的安全性是人類駕駛的10~20倍,成本可能低至每英里0.20美元,低於城市公車每英里1美元的成本。馬斯克也表示可能會從2026年開始生產Cybercab,成本預計低於3萬美元。
百度旗下的蘿蔔快跑積極進軍海外市場推出其無人駕駛汽車,以便將其競爭優勢擴展到中國大陸以外的地區。蘿蔔快跑希望在新加坡、中東等地測試並部署其無人駕駛計程車,且與這些地區的企業和監管機構討論相關計畫。2024年上半年,蘿蔔快跑發布全球首個L4級自動駕駛大模型Apollo ADFM,具備高安全性與完整的功能,能在複雜的城市環境中實現穩定可靠的自動駕駛體驗。
車輛電氣化腳步不停歇
然而,L4等級的無人駕駛儘管帶動汽車電子產業跨出產業升級與新商機的一大步,實際上卻是長期不斷累積成功小碎步的結果,恩智浦半導體2024年12月初舉辦恩智浦創新技術峰會(NXP Technology Summit Taipei 2024),針對車輛電氣化,恩智浦半導體全球銷售執行副總裁Ron Martino指出,車輛的軟體指令持續成長,預計代碼量將從現今的1億行增至2027年的5億行,硬體系統也逐步演變為軟體定義汽車(SDV)。至2030年,電子系統將占汽車物料清單成本的50%以上,顯示其關鍵地位。車輛開發周期將從3~5年縮短為1~2年(圖1),新平台不斷演變並推展到市場。
 圖1 車輛電氣化為車輛帶來幾個面向的進展(圖片來源:NXP恩智浦半導體)
圖1 車輛電氣化為車輛帶來幾個面向的進展(圖片來源:NXP恩智浦半導體)
另外,高度電氣化與自駕層級的提升將產生更多資料,NXP認為車輛產生的資料量也將從50GB快速增加到10TB;因應訊息量的大幅提升,ECU的處理能力與消耗功率都會同步提升,可能從現行的30~60W,提升至50~200W。同時,先進雷達技術、現代化充電設施和整合式架構,讓汽車不僅僅是交通工具,更成為邊緣運算的終極設備。
NXP預測到2030年,電動車的滲透率將達70%,60%的車輛具備L2或L3以上的ADAS功能,65%的車輛設計將導入軟體定義汽車(SDV)。台灣德國萊因交通服務新業務拓展總經理潘世文指出,汽車電子架構將由現行的分散控制單元(ECU),逐步朝向域控制單元(DCU),乃至中央控制單元(CPU)的設計架構發展(圖2)。
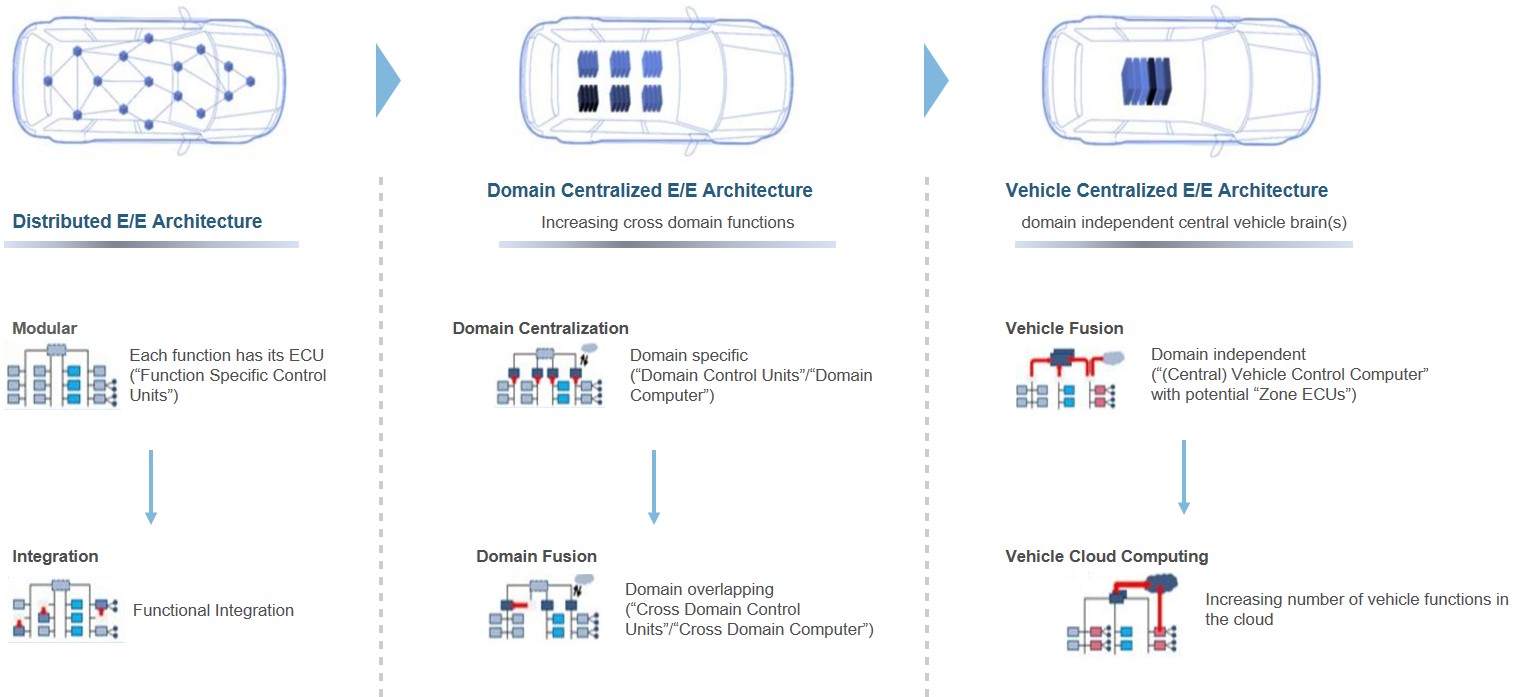 圖2 汽車電子架構設計由ECU、DCU朝CPU發展(圖片來源:TUV德國萊因)
圖2 汽車電子架構設計由ECU、DCU朝CPU發展(圖片來源:TUV德國萊因)
技術升級勢在必行
在自動駕駛系統中,感測融合(Sensor Fusion)是感測模組的核心任務,其目的是整合來自不同感測器如光達、攝影鏡頭、毫米波雷達、超音波雷達等的資料,生成統一且高精度的環境模型。這種多模態資料整合的優勢在於彌補單一感測器的不足,例如光達在精度上具備優勢,但在雨雪天氣和遠距離檢測中效果不佳;攝影鏡頭能夠提供豐富的視覺資訊,但其深度感知能力有限;毫米波雷達能夠穿透雨雪霧氣,但精度和解析度較低。
透過融合不同類型感測器的資料,自動駕駛系統可以獲得一個更加全面的環境資訊,尤其是在動態場景中,如行人穿越、車輛並排等情況。然而,這種資料融合測試面臨技術上的諸多挑戰,尤其在即時性、精度與穩健性(Robustness)上。融合技術中的瓶頸包括:
・時間同步:不同感測器的採樣頻率、回應時間可能存在差異。
・空間校準:感測器之間的安裝位置與角度不同,需要通過外參校正(Extrinsic Calibration)將它們的座標系統一到同一參考框架下。
・資料品質的差異性:不同感測器的輸出資料精度和雜訊特性差異較大。測試需要重點評估融合演算法如何處理高雜訊資料對整體感知精度的影響。
・備援與故障檢測:為提高系統穩健性,多感測器融合通常會設計備援機制以應對單一感測器故障。
車輛/環境同步智慧化為上策
自動駕駛系統的複雜性較傳統車輛系統大幅提升。以L3及以上自動駕駛系統為例,其運行依賴多層次的模組協同運作,包括感測模組的多來源資料採集與融合、決策模組的動態環境預測與規劃、以及控制模組的路徑執行與調整。
感測模組是自動駕駛系統的眼睛,通過光達、影像感測模組、毫米波雷達等多種感測器採集環境資訊。這些感測器不僅各自存在技術局限性,其資料還需要透過融合演算法實現一致性的環境感知。決策模組需要對感測到的環境資料進行即時分析,預測其他交通參與者的行為並規劃安全路徑。例如,在複雜的城市路口,系統需要同時考慮交通號誌狀態、周邊行人動態、其他車輛行為等。
自動駕駛的本質是提高車輛的整體系統安全性和可靠性,隨著場景複雜度、技術發展以及法規要求的不斷提高,未來,基於AI和數位分身技術的創新,以及全球化協作的測試平台,將進一步推動自動駕駛技術的落地與普及。同時,倫理與隱私測試的導入也將為自動駕駛系統的社會接受度奠定堅實基礎。
過去幾年,單獨發展車輛的智慧化或環境的智慧化,都很難讓自駕技術獲得全面性的突破,因此,同時提升車輛的智慧化,並考量行車環境的改善,包括車聯網(V2X)、交通號誌智慧化,法規的完善與測試驗證的全面完備,才能有效提升自駕層級,同時帶動背後數以兆計的龐大商機。