自主移動機器人(AMR)可幫助製造商提高生產效率、增強安全性並節省大量成本,因而在各行各業得到廣泛應用。進入工業5.0時代,人類將與人工智慧(AI)機器人協同工作,但要實現這一目標,AMR必須克服重重挑戰。
自主移動機器人(AMR)可幫助製造商提高生產效率、增強安全性並節省大量成本,因而在各行各業得到廣泛應用。2022年全球AMR市場規模為86.5億美元,預計2022年至2028年間的年複合成長率(CAGR)將達18.3%。
進入工業5.0時代,人類將與人工智慧(AI)機器人協同工作,機器人將輔助而非取代人類。願景固然美好,但要實現這一目標,AMR必須克服重重挑戰。整合各種感測器以及新興的感測器融合(Sensor Fusion)技術,是克服這些挑戰的關鍵之一。
採用AMR將面臨的挑戰
AMR普及的一大難題是其在多種不同應用和環境中的適應性。AMR已經廣泛應用於倉庫、農業技術、商業園林綠化、醫療保健、智慧零售、安防和監控、配送、庫存管理、揀選和分類等多個領域。在這些不同的環境中,AMR需要安全地與人類共處。
此外,複雜的情境也大幅增加AMR的工作難度。有些情況人類可以輕鬆應對,但對AMR而言卻並非易事。舉例來說,假設送貨機器人在配送最後一個包裹的途中看到路中間有一顆球,它可能會成功識別這一障礙物並避免碰撞;然而,其智慧化程度是否足以預判會有小孩跑出來撿球呢?類似這樣的複雜情境還有很多:AMR能否利用安裝在柱子上的90度反光鏡觀察彎道的交通狀況並做出預測?AMR是否知道自己不能在新澆注的混凝土上行走?
人類很容易針對上述情境作出判斷,但機器人卻難以應對。不過,若配備了合適的感測器,AMR在強日光下檢測物體的能力可以超越人類,但澆注的混凝土和噴灑的液體仍比較難以識別。邊緣、懸崖、坡道和樓梯對於AMR來說也都是挑戰。此外,AMR也可能遇到一些特殊情況,例如有人故意搞破壞,將AMR推翻,這也是早期開發逃逸機動系統的緣由。
要應對這些挑戰,需要在AI技術中採用先進的大型語言模型(LLM)和各類高性能感測器。
用於AMR的高性能感測器
AMR需要使用不同類型的感測器進行同步定位與地圖構建(SLAM),並提供距離和深度量測。感測器的重要指標包括物體偵測、物體識別、顏色識別、解析度、功耗、尺寸、成本、範圍、動態範圍、速度,以及在各種光照和天氣條件下的適應性。
可用於AMR的感測器模式包括:CMOS成像、直接飛行時間(dToF)和間接飛行時間(iTOF)深度感測、超音波、雷達、電感定位、藍牙低功耗(Bluetooth LE)技術、慣性。
上述模式各有其優缺點。例如,雷達能在弱光或惡劣天氣條件下仍具有良好的測量範圍和速度,但顏色檢測能力較差,初始成本高且體積較大,而體積大小在AMR設計中是重要的考慮因素。光學雷達(LiDAR)採用大批量CMOS矽製程,因此初始成本相對較低,並且能夠在夜間/陽光直射下進行偵測,但在物體分類方面表現欠佳。iToF深度感測器則具有出色的解析度和低功耗處理能力。
顯然,僅靠單一感測器模式並無法為AMR提供應對上述挑戰所需的全面資訊。根據應用和環境的不同,AMR需要使用多種感測器模式。這些感測器不會各自獨立運行,而是透過「感測器融合」共同發揮作用。
感測器融合賦能AMR
感測器融合是指結合兩個或多個資料源(來自感測器和/或演算法或模型),以更完整地了解系統及其周圍環境。AMR中的感測器融合不僅可以提升可靠性、備援度並最終確保安全性,還可以提高評估的一致性、準確性和可信度,是一項不可或缺的技術。
如圖1所示,感測器融合結合了資料收集和資料解釋兩個功能。在感測器融合中,解釋資料(Interpret Data)的步驟需要藉由演算法或模型的實作來完成。有時感測器融合的結果直接為人類提供有用資訊(如倒車輔助),有時則提供給機器以作進一步處理(如安防系統中的人臉識別)。
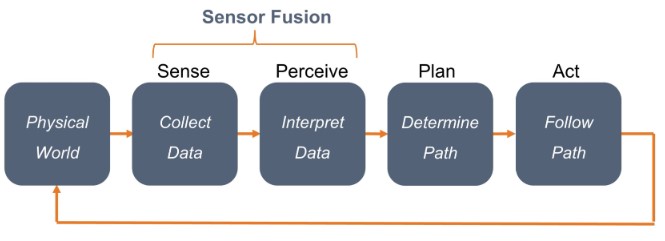 圖1 感測器融合過程
圖1 感測器融合過程
感測器融合具有多項優勢,例如降低訊號雜訊。同質感測器融合可以降低非相關雜訊(Uncorrelated Noise);異構感測器融合可以降低相關雜訊(Correlated Noise)。
基本上,感測器融合可透過備援來提高可靠性。由於感測器的數量至少有兩個,這意味著即使其中一個感測器的資料丟失,資料品質降低,系統仍可利用其他感測器提供的資料繼續工作。感測器融合也可以用於預估無法直接測量的狀態,如遮擋(當攝影機無法觀察到物體或物體的一部分時)和反射(當物體或表面將光線從一個攝影機反射到另一個攝影機時)。
有鑒於以上優勢,以及其日益上升的採用率,感測器融合領域已出現以下趨勢:採用AI驅動的演算法、增強物體偵測和分類能力、將感測器融合用於實現協同感知(Cooperative Perception)、多種感測器模式、惡劣條件下的環境感知、將感測器融合用於實現360度環視、即時感測器校準。
感測器融合的核心在於感測器本身,如果獲取的資料不理想,再好的演算法也無法生成高品質的結果。廠商如安森美(onsemi)所提供的感測器和工具,將協助AMR順利整合感測器融合技術。
感測器為重 AMR最佳實務成形
AMR應用場景多元,採用率正加速提高。順應此趨勢,產業已形成了相關的最佳實務:首先,對環境實施控制,以減少AMR可能遭遇的潛在碰撞情形,例如在製造設施或倉庫中為AMR/自動引導車輛(AGV)設定專門的路線;其次,在開發過程中使用數位分身模擬實際使用場景(包括邊角案例);最後,將感測器融合與智慧感測器、演算法和模型相結合。
AMR中的感測器融合必將對工業和運輸應用邁向工業5.0的進程產生重大影響,而感測器和相關子系統是AMR發展過程中的關鍵要素。例如,安森美便提供各類捲簾快門和全域快門影像感測器,以及用於距離偵測(LiDAR)的SiPM,該公司產品組合包括超音波感測器、電感感測器和採用藍牙低功耗技術的微控制器,後者支援可用於定位的到達角(AoA)和出發角(AoD)。此類感測器及相關技術將為AMR進入各式應用場域的助力,加速智慧感測普及程度。
(本文作者為安森美半導體系統工程經理)