協同式機制之行車安全防禦技術的概念是讓車與車(V2V)或車與路側(V2R)單元可以進行訊息交換,用來事先預知「來車」與「本車」目前的駕駛行為與即將發生的下一步動作。綜 合而論,以專用短距離通訊(Dedicated Short Range Communication, DSRC)最適合作為行車安全應用的傳輸媒介。然而,為了在現實環境中達成「無縫式」的行車安全保障,更多的因素與問題須要被克服。本文將針對協同式車用安全機制未來可以改善的部分進行更深入分析與評估。
協同式機制有待強化
協同式路口防撞預警系統,其組成的系統架構可參考圖1所示,除了須具備與其他車輛或路測單元「溝通」的通訊模組外,最重要的條件是要能準確地取得本車地理位置,通知周遭的其他車輛。
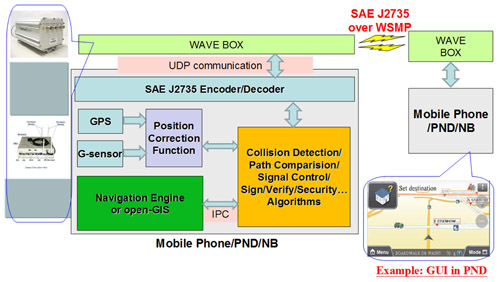 |
| 圖1 協同式系統架構 |
最直覺的作法就是取得全球衛星定位系統(GPS)資訊作為預測之資訊。然而,由於GPS系統本身的限制,GPS座標依據不同的環境因素,其誤差範圍可能從數公尺到幾十公尺都有可能發生。因此,使用GPS作為車用安全系統的重要推估資訊來源是無法接受的。再者,GPS更新的頻率大約為1秒更新一次,在汽車高速行駛下,在不到1秒的時間內,瞬間加速度改變就可以前進好幾公尺以上,這時候很可能系統在上1秒所評估兩車的移動參數如行駛速度、方向、位置等依據,由於加速度的劇烈改變而影響了下1秒的判斷結果,這對系統安全的可靠度將造成嚴重的危害。根據相關文件的探討,GPS誤差主要原因包括:
| ‧ |
|
| |
衛星星曆誤差、衛星鐘差、衛星訊號發射天線相位中心偏差、電離層延遲、對流層延遲、接收機鐘差、接收機天線相位中心偏差。
|
目前已有許多誤差修正方法被提出用以降低GPS誤差,其中包含基於硬體與軟體的各種修正方式,概括而論可分為差分全球衛星定位系統(DGPS)、地圖匹配演算法及組合定位等三種類型。目前DGPS參考基地台覆蓋範圍並不廣泛,特別是北美以外的地區,難以獲得利用。地圖匹配演算法則仰賴圖資配合的修正,在許多情況並不適用。
隨著技術的發展,感測器(Sensor)的功能及性能日新月異,價格也有越來越低的趨勢,使用集合感測器的組合定位技術具有提供高精度和高容錯的潛力,可以有效解決GPS位置校準問題。單獨的GPS定位系統無法獲得車輛的準確位置,故可配合其他定位設備或感測器如G-Sensor進行資訊融合,彼此之間互相進行補償組成組合導航系統,可得到更高的定位精度,讓系統更精準地掌握車子的移動向量。
善用智慧手機內建的G-Sensor
圖2為資策會智慧所提出一套解決方案,利用智慧型手機裝置內建的G-Sensor裝置,結合Kalman Filter來預測與修正GPS的誤差位置。從圖2中可以看出,左邊的圖是原始的GPS位置資料,可以觀察到GPS位置有時候會突然偏移,在某些時間點上,甚至收不到位置資訊。配合Kalman Filter方式則可以利用慣性原理,預測出下一點可能的位置,來增加系統的準確度,修正適當的偏移量。
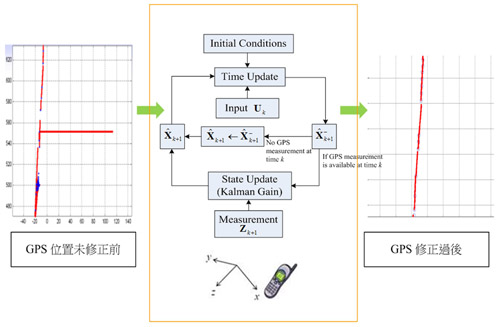 |
| 圖2 Kalman Filter定位校正 |
此外,協同式機制實施時最大的困難點就是設備普及率問題,也就是所有的車輛必須安裝DSRC車載單元(OBU),並配合路側單元(RSU)的基礎建設,如果有部分車輛在路上未裝載類似的系統設備,對於其他有裝載該設備的車輛來說,這些車輛就有如隱形車一樣,對於協同式預警系統的運作將造成嚴重的影響。
目前資策會智慧所、交通大學與工研院機械所也提出了結合多重感知與通訊技術的解決方案(圖3)。藉由於路口布建智慧影像辨識技術,偵測鄰近車輛之動態如座標、速度、方向等資訊,將整合後的路口事件綜合描述(Integrate Event Description for Intersection, IEDI)通報給各個即將抵達該路口的車輛。
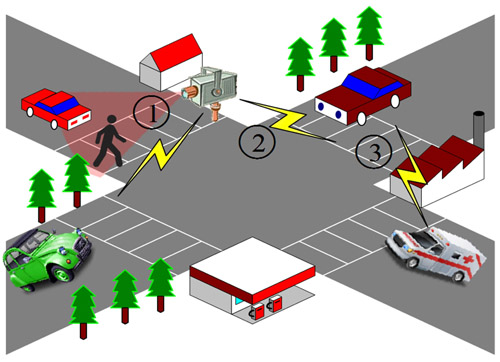 |
| 圖3 結合RSU提升系統預警準確度 |
至於「多重感知整合式車載資通訊安全系統」的運作流程則是,當路口攝影機偵測到有其他車輛或行人通過路口時,根據該事件的移動行為,將該事件彙整為一綜合描述。接著,RSU將該事件依據SAE J2735規範標準,加以適當地封裝與編碼,通報給各個即將抵達該路口之車輛。此時,兩車若支援車用環境無線存取(WAVE)/ DSRC車用標準通訊協定,也可利用車輛間定期的訊息交換與「十字路口碰撞警告」演算法推斷可能的碰撞機率,並適當的提出警告給駕駛者,降低事故發生的機會。
智慧型運輸系統成形
不可避免地,利用DSRC技術實現協同式機制,會面臨通訊品質的穩定性、GPS訊號的精確度、普及率等三個問題。
前兩項問題雖可仰賴相關技術的發展及進步,可望在短期內獲得一定程度的改善,但設備普及率的問題,不論是車與車或車與路側單元的訊息交換,除了OBU設備外,也須要有RSU之基礎建設的配合,而為達成此一環境,則必須仰賴政府政策的配合與車廠的共同推動,才能建立無縫隙的協同式安全防禦機制,以提升現有行車安全系統之效能,共同攜手打造下世代智慧型運輸系統(Intelligent Transportation System, ITS)。
(本文作者任職於資策會新興智慧技術研究所)