長期以來,CAN、LIN、FlexRay、MOST等資料傳輸協定在車載網路各司其職,然而,隨著車輛邁向區域控制(Zonal)架構、自駕程度提升帶來更嚴格的安全要求,既有協定漸漸難以滿足新世代車輛需求。確定性(Deterministic)乙太網路協定為製造商提供新選項,預期將成為車載網路的明日之星。
越來越先進的車輛提升道路安全,隨著駕駛輔助功能和效能的提升,底層技術的重要性也隨之增加。無論是傳統的內燃機(ICE)驅動車輛、混合動力車還是純電動車,汽車設計中都包含了數十種感測器、微控制器及致動器,而這些元件都會生成或處理大量資料。
現代車輛不僅僅是一種交通工具,更是車輪上的先進運算平台。與所有運算系統一樣,有效傳輸資料的能力對於此類系統的平穩運行和安全操作至關重要。
常用車載網路(IVN)技術
電子技術在車輛中已應用數十年,提供了許多實用功能,通常用於增強安全性或娛樂性。早期,許多功能都是獨立存在,既不向車輛的其他系統提供資料,也不依賴其他系統提供的資料。然而,隨著技術進步,整合帶來的優勢逐漸顯現,汽車專用的網路技術應運而生。
在車輛中普遍採用的協定包括LIN匯流排(Local Interconnect Network, LIN)、CAN匯流排(Controller Area Network, CAN/CAN-FD)、FlexRay匯流排以及MOST匯流排(Media Oriented System Transport, MOST)(圖1)。雖然每種解決方案都有其獨特之處,並可滿足不同的設計考量,這些技術方案仍難以滿足現代車輛日益成長的需求。
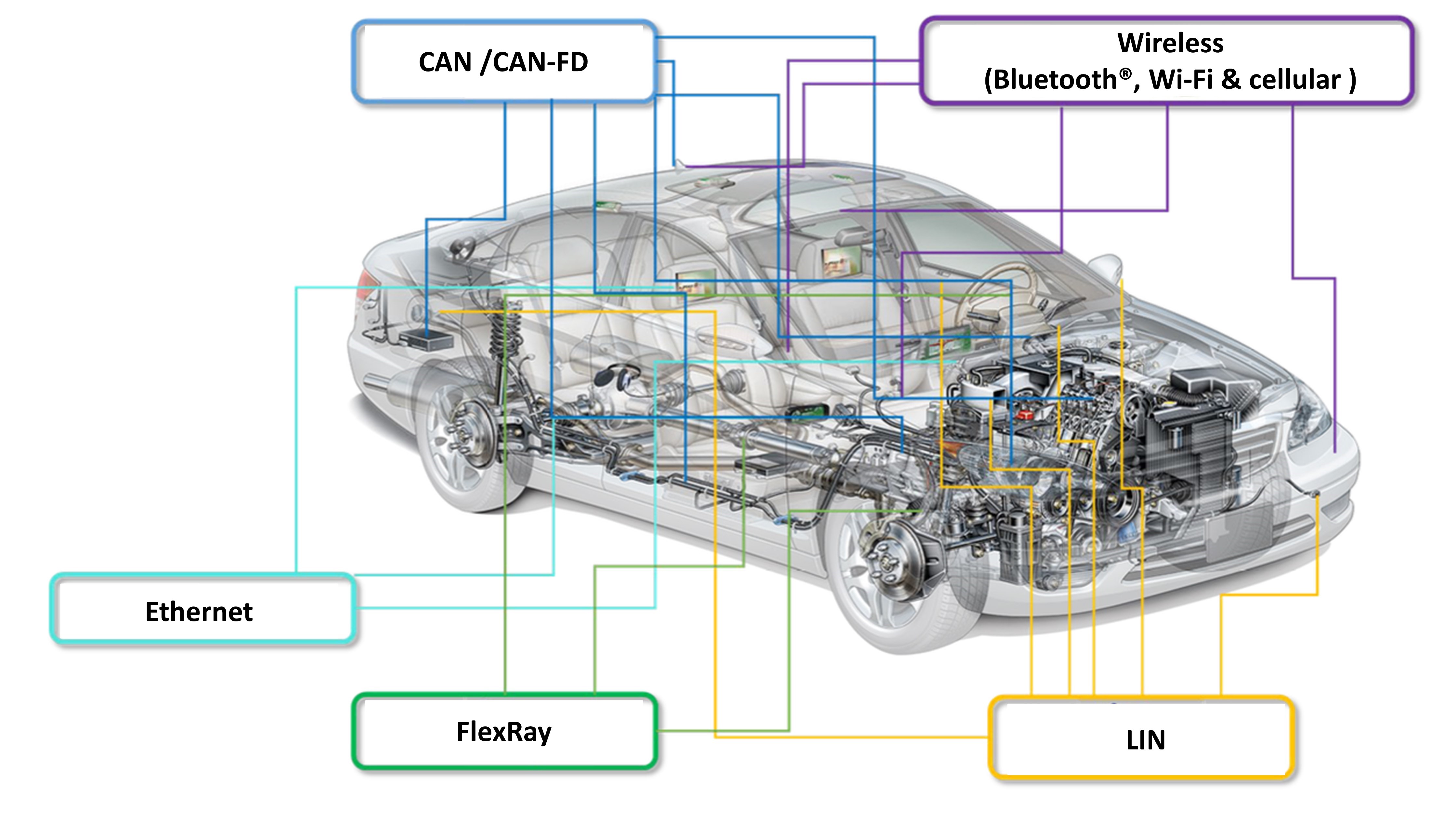 圖1 針對車載應用,目前已經開發出多種通訊協定
圖1 針對車載應用,目前已經開發出多種通訊協定
LIN匯流排是一項成本效益高的技術,適用於低資料速率(<20kbps)的應用場景。然而,LIN匯流排有限的頻寬以及被限制在12個以內的系統節點數量,也限制了該協定在現代車輛中的價值。
CAN匯流排(以及後續版本如CAN-FD)具有高穩定性,並且相對不會受到電氣干擾和雜訊影響,因此在車輛和其他安全關鍵系統中獲得廣泛採用。然而,有限的頻寬(通常約為2Mbps)限制了CAN匯流排在某些資料密集型應用中的使用,例如資訊娛樂系統和相機鏡頭,同時也限制了節點的數量。新的CAN-XL標準將實現更高的資料傳輸速率並具備與乙太網路銜接的能力,但對於許多工程師來說,直接過渡到全乙太網路解決方案似乎更具吸引力。
FlexRay匯流排提供了精確的定時和同步功能,使其適用於諸如線控驅動(Drive-by-wire)等時間關鍵型應用。然而,與其他匯流排相比,FlexRay匯流排的複雜性限制了其普及程度。
MOST匯流排僅用於資訊娛樂系統,適用性有限且成本高昂,因此該技術日漸式微,逐步被其他解決方案所取代。
乙太網路被許多人視為替代現有多種解決方案的理想選擇,可以提供高頻寬和低延遲的通訊能力。然而,現行的乙太網路協定存在一個問題,即其固有的載波檢測多重存取/碰撞避免(Carrier Sense Multiple Access with Collision Detection, CSMA/CD)機制,此機制的存在代表乙太網路無法實現確定性操作(Deterministic Operation),因此不適合用於任何時間敏感型應用,比如線控驅動。此外,乙太網路技術的成本也是一個問題。考慮到乙太網路的巨大潛力,現在已經出現了如10BASE-T1S這樣的確定性協定,包含實體層衝突規避(Physical Layer Collision Avoidance, PLCA)機制(圖2),為時間關鍵型應用提供所需性能。此外,車用乙太網路(Automotive Ethernet)設備的成本也正在迅速下降,讓更多汽車製造商能夠受益於高頻寬技術。
 圖2 在PLCA週期中,每個Slave裝置發送資料之前,Master裝置會透過一個BEACON訊號開始通訊,進而避免碰撞和相關的重傳成本
圖2 在PLCA週期中,每個Slave裝置發送資料之前,Master裝置會透過一個BEACON訊號開始通訊,進而避免碰撞和相關的重傳成本
乙太網路在OPEN聯盟(OPEN Alliance)等組織的推動下不斷發展,以滿足現代汽車日益增加的頻寬需求。新標準(如IEEE P802.3dh)將使未來車輛能夠採用光纖進行傳輸,用以支援低延遲4K影音和擴增實境(AR)等需求極其嚴苛的應用技術。(編按:IEEE官網已於2024年2月宣布撤回IEEE P802.3dh計畫(PAR))
駕駛和乘客常透過藍牙、Wi-Fi和行動通訊等無線協定來連接他們的行動裝置。無線通訊主要用於滿足有線連接無法實現的功能,例如胎壓監測(TPMS)和免鑰匙啟動。然而,隨著車聯網(V2X)技術的發展,車輛可以與其他車輛及其周圍環境進行通訊,對無線通訊的需求也進一步增加,對於安全性的需求也同步提高。
Zonal架構/自駕浪潮襲來 確定性乙太網路全速應援(1)
Zonal架構/自駕浪潮襲來 確定性乙太網路全速應援(2)