配備免鑰匙進入(Passive Keyless Entry, PKE)系統的汽車讓消費者毋須使用機械鑰匙或按動掌上型密匙的按鈕,便可以開啟上鎖的車門。PKE系統有密匙和基地台兩個主要元件,密匙通常放置在車主或駕駛者的錢包或口袋裡,而基地台則安裝在汽車上,包含產生環繞在汽車周圍,通常為125kHz低頻(Low Frequency, LF)磁場的裝置,同時基地台接收通常為315MHz或433.92MHz的射頻(Radio Frequency, RF)訊號。
這種基本系統不斷演進,逐漸加入更多特點,如無鑰匙引擎啟動、無鑰匙門鎖和接近燈(Approach Lighting)系統等等。然而,基本的系統技術並未有改變。
PKE運行取決關鍵參數
實現PKE的主要技術是LF磁場的產生和測量,以及RF無線電傳輸和接收。簡單來說,當PKE系統因某一事件如拉起車門把手而觸發,汽車基地台便會產生LF磁場。配有測量3維(X、Y和Z軸向)磁場強度方法的密匙,捕獲此資訊並透過RF訊號傳回汽車基地台。如果確定該密匙是屬於此車,並處於汽車附近的適當位置,基地台就會打開駕駛者的車門。
明顯地,該系統的正確運行取決於關鍵參數,例如觸發事件至車門打開的反應時間、可重複LF磁場的產生和精確的LF磁場強度測量、LF磁場的抗擾能力。本文將重點探討這些參數的性質,以及在PKE系統內將其最佳化的方法。
PKE系統跨越LF/RF頻域
PKE系統的通訊跨越LF和RF兩個頻域。在每個頻域內都存在一個包含某些基本磁場訊號的通訊協定。在LF頻域內,基地台必須發送足夠穩健的資料模式,以便區分有效通訊和雜訊。同時,它還應對授權密匙如何回應訂出次序,每輛車可以有多達八個編號,授權密匙透過發送RF資訊來避免衝突。最後,基地台需要為密匙發送一段時間持續和恆定的LF磁場,來獲得磁場強度的準確測量。
在RF頻域,密匙必須安全地與汽車基地台通訊,憑著所需的資訊來確定是否可以打開汽車。通常,LF頻域使用二進位或矩形脈衝寬度調製(Binary or Quad Pulse Length Modulation, BPLM或QPLM),以3.9kbit/s的串列傳輸速率進行通訊,而RF頻域通訊使用開關或頻移鍵控(On-Off or Frequency Shift Keyed, OOK或FSK)調製,傳輸速率為4k~20kbit/s。
降低雜散磁場喚醒
為將錯誤喚醒減至最少,並延長密匙的電池壽命,將需要一個從基地台到密匙的預定義資料模式。該模式被稱為封包(Preamble),一般包含連續的資料位元串,例如0後面跟隨相反極性的同步位元,例如1。連續的資料串必須足夠長,才可以使密匙啟動及核實有效資料位元時序是否存在。如果時序核對通過,為採集剩餘資訊,使用同步位元來調校資料接收緩衝區。由於前同步碼串中的連續位元的數目增加,因此降低雜散磁場喚醒的可能性。圖1和圖2顯示數種典型的LF磁場調製模式。
 |
| 圖1 LF前同步碼和元件喚醒 |
 |
| 圖2 帶有有效負載資料訊號的LF封包(接收2位元組) |
採用時隙防衝突協定
從汽車基地台發送到密匙的LF資訊中包含一項關鍵資訊:一條規定密匙回應次序的規則。如果沒有該資訊,與汽車配對的所有密匙都很可能同時回應,並毀掉全部的RF回應。解決此問題的通用方法就是時隙防衝突協定(Time-slotted Anti-collision Protocol)。這包含分配特定的密匙到特定的時隙,在此期間它們被允許回應。例如,假設汽車與四個密匙配對,而每個密匙都分配數值範圍從1到4的獨一無二的識別數字。分配到特定時隙的獨特密匙識別數字在初步的LF資訊中就已經被預先定義(圖3)。
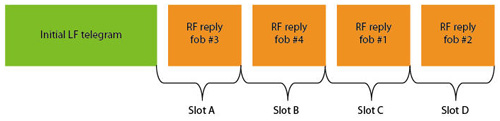 |
| 圖3 時隙防衝突方法 |
測量接收訊號強度
對於從汽車基地台發送的LF資訊,剩下的關鍵問題是測量X、Y和Z軸的磁場強度。通常在LF磁場處於連續波(Continuous Wave, CW)模式時進行測量並完成。PKE系統在此方面要考慮的重要參數為靈敏度、準確性和轉換時間。
靈敏度可以具有幾種含意,取決於實際的應用場合。有時它是指喚醒LF檢測電路所需的最小可檢測電壓幅度;其他時候它則是可以被檢測和轉換為數位值的最小電壓幅度。
在上述兩種情形中,典型的度量單位為毫伏特(mV),並且可以被規定為峰值(VP-P)、均方根值(VRMS)或峰值電壓(VP)。其數學上的相關性如公式1:
...................公式1
準確性是指在類比到數位(Analog to Digital, A/D)轉換期間引入的誤差。誤差的主要來源為A/D基準電壓、解析度的位元和接收天線諧振頻率的變化。在設計時,電子元件如何對誤差做出補償的設計是很重要的。根據不同的解決方案,補償會為A/D轉換過程增加相當多的複雜性和時間。
轉換時間是校準、轉換和補償類比電壓所需的時間,該類比電壓出現在三維(3D)接收天線的每個軸向上,天線包含在密匙內。重要的是,在設計定型之前,須考慮是採用對三維天線三個軸向依次進行A/D轉換的設計,還是採用對三維天線三個軸向進行同時並行A/D轉換的設計,這取決於所選設計方案的架構。IC供應商的校準和補償技術的差別很大,必須仔細研究,以便了解其對PKE系統重要的轉換時間的影響。
磁場強度維繫PKE正常運作
要PKE系統正確運作的基本要求是,能夠在汽車周圍不斷產生已知及具有足夠強度的磁場,而且可以準確測量。以下將集中討論PKE系統在這個方面的應用,並討論影響系統性能的LF磁場參數。
產生磁場
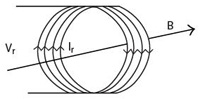 |
| 圖4 磁場的形成 |
如圖4所示,磁場B為當電流流過線圈時產生的磁場。磁場集中在線圈的中心,並且沿著軸向傳播,通常相對於由線圈橫截面形成的平面;磁場從線圈的一端環繞到另一端。磁場的幅值透過磁通量來量化。在自由空間,依據電流大小和線圈幾何形狀,磁通量的分布可以預知。然而,當在磁場中放置鐵磁物體,例如可被磁場吸引的金屬,磁通量模型就會變形,所以在評估補償技術時,須要考慮這一點。
圖5顯示兩個不同線圈所產生的磁場強度,隨距離的變化,每個線圈具有不同的半徑。值得注意的是,磁場強度與線圈匝數和電流大小成比例。明顯地,從圖表的縱座標使用的對數比例來看,當離線圈中心的距離D增加時,磁場強度趨向於以指數比例衰減:1/D3。這是個很好的特性,可以限制PKE系統的實際工作範圍不超過5公里(km)。當考慮與某些補償方法有關的數學複雜性時,這也是另一個重要的因素。
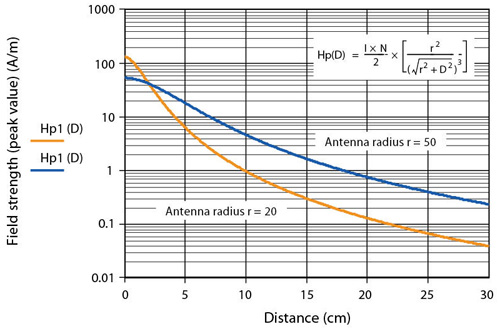 |
| 圖5 磁場強度對比距離 |
調諧諧振
車載線圈(產生LF磁場)和可攜式密匙線圈(測量LF磁場)兩者都必須調諧到在相同頻率上諧振,從而讓系統性能最佳化。諧振出現在線圈的複數阻抗為0時的假想條件下。這也是電容性和電感性電抗變得相等並相互抵消時的頻率(公式2)。
...................公式2
諧振電路的諧振頻率由公式3定義:
...................公式3
因為線圈具有固有(Inherent)的電感,所以必須引入電容元件來達到諧振。可以透過並行或串行來獲得諧振。實際上,車載線圈中的諧振是藉著增加一個串行的電容器而獲得,從而讓線圈電流最大,同時在密匙天線中採用並行電容以使其感應電壓最大。
留意品質因數Q
線圈品質的常用指標為品質因數Q。此因數既影響系統鮑率(Baud Rate);也影響測量線圈中的感應電壓大小。品質因數Q定義為電感器感抗與其直流(DC)電阻的比值,如公式4所描述:
...................公式4
較大的Q值會在測量線圈上產生較大的感應電壓和較好的性能,但是對資料速率有負面影響。經常使用的品質因數Q為15,此典型值是這些限制因素間的一個合理平衡。兩個具有類似品質因數Q的磁場線圈和磁場測量線圈,可產生最佳的系統性能。
測量磁場強度
磁場強度是透過在磁場中置入天線線圈來測量的,在測量線圈中產生的感應電壓是其線圈的物理性質(先前討論的機械和電氣特性)的函數,並與磁通量成角度調整關係。
當磁場產生線圈和磁場測量線圈具有相同的軸向時,與角度調整相關的感應電壓分量可達到最大值。當兩個線圈軸線正交時則不會產生任何感應電壓。其關係可以簡單地進行模擬,如公式5所示,這裡的θ為線圈軸線間的角度。
...................公式5
在PKE系統中,密匙方向是不受控制的,須要使用三個測量線圈來評定它在自由空間的位置;每個線圈對應一個軸向X、Y和Z。
定位測量實際考量不可輕忽
PKE系統的首要目標是準確且迅速地確定掌上型密匙相對於汽車的位置。外部因素如溫度、磁場失真、諧振電路元件老化效應和初步公差,都會影響系統準確測量密匙位置的能力。其他系統內在的屬性,例如靈敏度、A/D轉換曲線(對數對比線性),以及A/D解析度也會給測量過程帶來誤差項,並增加測量補償的複雜性。
當考慮替代的設計方法時,了解這些誤差的來源、可用的補償技術,並考慮它們對整個系統回應時間的影響是很重要的。
對目前PKE磁場強度測量解決方案{TC V2}的詳盡研究不在本文的討論範圍內。然而,為說明LF磁場強度測量誤差補償技術的基本概念,本文將藉著愛特梅爾(Atmel)ATA5790晶片來介紹,它是一個完全整合(不包括諧振線圈電路)的PKE系統解決方案。
微調諧振頻率
只有當磁場產生線圈和測量線圈調整到在相同頻率上諧振時,才可能達到最佳化的性能。在設計時依據測量線圈的標稱(Nominal)電感,然後選用數值適當的諧振電容器,可以完成上述最佳化。
然而,在線圈和電容中,元件至元件的容差變化總會導致性能低於平均水準。為進行補償,能夠微調諧振頻率回到標稱值的設計是很有吸引力的一種設計。ATA5790晶片具有這項能力,透過積體可變電容陣列,對每一個3D測量線圈輸入以並聯方式來配置,可以從0~120皮法(pF)進行調整。
在實作中,這種補償形式在汽車密匙生產製造時進行一次。透過後段(End-of-line)測試儀,相對於一個控制良好的恆定磁場,控制測量線圈的位置並校準,每個軸向和每個密匙的元件至元件的分量變化,都可以單獨被量化及修整,而每一個可變電容陣列的修整值都將被保存在非揮發性記憶體中,在產品的整個生命週期內使用。
自我調整環境補償
在設計穩健的PKE系統時另一組要考慮的因素,是一些受環境變化影響並可能引起不可預知特性的因素,它們會對測量精度帶來負面影響。這些因素可能是溫度、電感/電容(L/C)元件老化、局部載入/測量線圈的失諧或是任何其他降低測量線圈回應特性的因素。
在此方面,性能退化與線圈至線圈的耦合減弱有關,會導致密匙天線上接收的訊號電壓降低,而且同時在密匙定位測量期間讀取較低的接收訊號強度指令(RSSI)值。為了補償此類影響,在受控環境條件下來自預定義訊號的響應,即Vin factory必須被測量,並且與經受未知環境條件且來自相同預定義訊號的響應Vin service相比較。比較Vin factory和Vin service可以量化已經發生的環境退化數值,並將此偏移值Vcompensation施加到隨後汽車線圈產生磁場的測量中。
為讓此方法有效,必須具有數項設計特性,包括內部參考訊號、將它應用到接收天線線圈的方法,以及在LF磁場產生過程中實施測量的可預知間隙。ATA5790在單一封裝內整合這些特性中的前兩個。只要結合LF通訊協定規格來實現特性,ATA5790便能夠實現這種自我調整環境補償技術。
這裡有一個例子可以說明這項技術。在密匙製造期間,進行線上測試時,對ATA5790進行諧振頻率修整,並永久保存這些參數(有關更多細節參見先前的部分),修正時,密匙周圍的磁場將完全受控,並擺脫任何形式的寄生負載或影響。下一步,ATA5790啟動自測試程式,連接測量線圈與內部產生的激勵訊號,所有輸入線圈的響應電壓均被同時測量。來自每個線圈的測量結果,VX-internal factory、VY-internal factory和VZ-internal factory都被儲存在非揮發性記憶體中,並在密匙的整個壽命週期內使用。製造過程完成後,將密匙交給客戶使用。
當在使用中及處於外部LF磁場中已知的間隙期間,線上測試期間所使用之內部產生的相同激勵訊號出現在測量線圈中。測量來自每個線圈的響應電壓;VX-internal factory、VY-internal factory和VZ-internal factory並減去製造期間獲得的數值,以確定每一軸向所需的補償額。下一步,進行由汽車產生的外部LF磁場的測量,如VX-external servicey、VY-external servicey和VZ-external servicey。只要對每一個軸向增加相應的補償值,便可以更準確地評測密匙在空間中的定位。總結來說,每一軸向的補償公式6如下所示:
...................公式6
注意磁場強度測量平均值
為A/D測量值計算平均值,可以消除瞬變情形及提高定位資訊的可重複性。當此原理應用於PKE系統時,能夠增強LF磁場強度測量過程的完整性,並且更準確地評估密匙的空間定位。
在實施這樣的演算法時,重要的是需要考慮對回應時間的影響,例如對X、Y、Z軸向進行同步採樣或順續採樣,及對每一軸向的採樣次數,還有A/D轉換時間。
在上述提到的前兩項類別中,ATA5790晶片為設計人員提供超越其他解決方案的優勢。該元件採用平行轉換架構,同時實現X、Y和Z軸線的A/D轉換。更進一步來說,初步轉換發生後,通常在大約1.5毫秒(ms)後,便可以每48微秒(μs)刷新一次。由於刷新速度這麼快,所以可以實現包含八個連續A/D取樣值的均值演算法,而造成的影響微不足道。
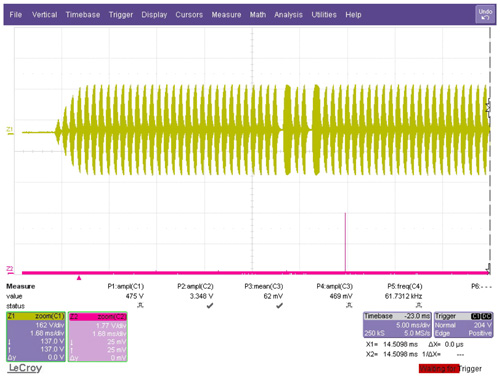
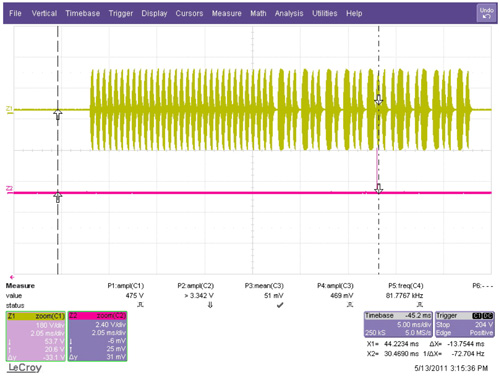
為了說明此一點,請參考圖6,這是一個來自示波器的螢幕截圖,顯示A/D取樣,以及外部與內部兩個磁場強度的均值測量運算。Z2跡線顯示在LF磁場中的A/D取樣操作,第一個連續八次的A/D取樣運算發生在最初的空隙,包含八個連續A/D轉換和均值運算,然後第二個連續八次A/D取樣運算發生在連續的LF磁場發送期間,如Z1跡線所示。
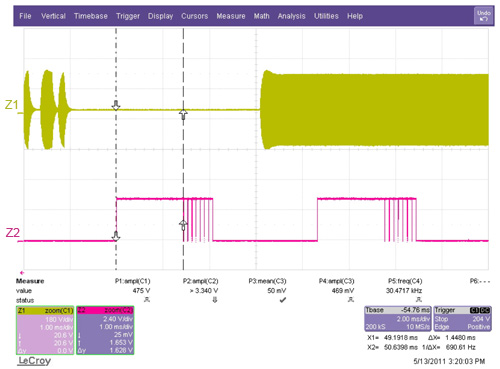 |
| 圖6 內部和外部A/D轉換測量 |
要注意的是,初步A/D轉換時間大約為1.5毫秒,而在這之後跟著的七個額外轉換,每個大約為85微秒。在這個例子中,用於均值計算和保持的軟體費用(Overhead),在最快48微秒刷新率上增加了額外時間。
A/D轉換器架構舉足輕重
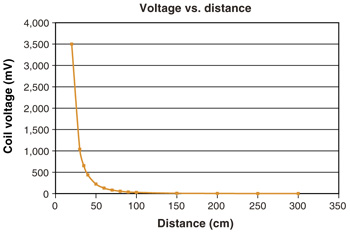 |
| 圖7 線圈電壓對比距離 |
在PKE系統內,A/D轉換器的架構在位置精確度方面具有重要的意義。當考慮類比線路圈電壓和距離間關係的曲線時,可以直觀地看到帶有對數傳遞函數的A/D轉換器將產生更好的結果(圖7)。
實際上,選擇此方法有著堅實的基本原理。也就是,相比採用線性傳遞函數的A/D轉換器,當使用對數A/D轉換傳遞函數來調節接收線圈上的電壓時,可以在更大距離上接收訊號,也就是每個A/D轉換步驟具有更好的距離精確度。
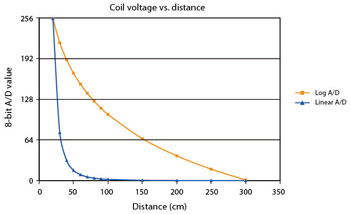 |
| 圖8 對數和線性A/D值對比距離 |
圖8把線性和對數A/D回應相疊加,每個A/D具有8位元解析度。須要指出的是,線性A/D回應在近場區(<50釐米)使用了它在0至255的可用轉換範圍中的大部分(240步),而只在遠場區留下很少(16步)。
另一方面,對數A/D回應在它0至255的可用轉換範圍內的分布比較均勻,可遍布整個距離測量範圍。因此,相比採用線性A/D回應,對數A/D回應具有出色的定位精確度,有可能達到更大的距離範圍。
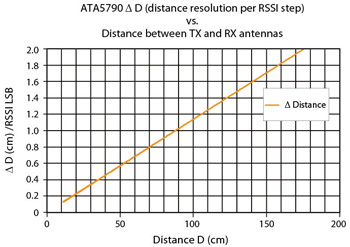 |
| 圖9 距離測量準確性對比線圈距離 |
對於更詳細的定位精確度與密匙對車載天線距離間的關係,可參考圖9。
準確和精確地獲取PKE定位資訊的過程,並不是一項簡單的工作。本文說明影響回應時間、準確性和可重複性的許多因素,以及在設計過程中就必須考慮這些因素的原因。幸好,現有的電子解決方案已能整合並實現本文所描述原理的實施方案。
(本文作者任職於愛特梅爾)