自駕車議題不斷發酵,在增進安全的前提下,汽車電子化比重不斷提升,而邁向自駕終極目標的過程中,包括光達、毫米波雷達、AI運算平台、HD地圖、MCU等關鍵軟硬體技術,都將大幅發展。台灣應從資通訊領域切入,持續發展未來自駕車商機。
現在,世界各地已經有許多自駕車在道路上進行測試,不過相關測試報告都不約而同指出,自駕車的安全性依然是最需要關注的重點,尤其是透過各式感測技術以強化車輛對環境的感知能力與緊急事件的偵測、應變能力,包括光達(LiDAR)、毫米波雷達(Radar)、影像感測器(Image Sensor)、超音波(Ultrasonic)等,這些元件近期透過技術改善,強化偵測感應能力,希望能將功能再進化並降低成本,同時提升整合度,成為功能更強大的ADAS系統,透過多個系統同時運作互為備援以彌補各種感測技術的不足,讓自駕車的安全行駛疑慮降低。
另外,未來的自駕車就像是一台行駛在路上的超級電腦,面對不斷產生的訊息,必須透過更多的微控制器(MCU)統整,並以CPU/GPU等處理器運算、決策,隨著自駕車發展熱度飆升,相關技術與零組件也快速躍進;另外,AI技術的發展也協助自駕車能力等級的提升。本活動剖析自駕車未來的安全性提升重點,並介紹相關零組件技術與應用設計趨勢,同時探索這些零組件與系統蘊含的龐大商機。
 |
| 圖1 工研院資通所車載資通訊與控制系統組長蔣村杰說,光學雷達與高頻雷達已被視為達成高階至全自動駕駛的關鍵元件。 |
關鍵感測器需求飆升
自駕車議題不斷發酵,在增進安全的前提下,汽車電子化比重不斷提升,自駕當然是終極目標。在邁向自駕的過程中,感測器無疑是最重要關鍵零組件之一,工研院資通所車載資通訊與控制系統組長蔣村杰(圖1)說,光學雷達與高頻雷達是兩個明星技術,自從特斯拉(Tesla)著名的自駕車意外發生後,昂貴但是可靠度高的光達更為水漲船高,已被視為達成全自動駕駛的關鍵元件。
光達可以精準測量物體距離,用來偵測、辨識周圍物體,光達分為2D與3D兩種,2D偵測水平範圍,3D則可以涵蓋360度椎狀立體空間,除了能可靠偵測立體物件,更可由掃描輪廓達到一定程度的物體辨識。蔣村杰解釋,3D光達具備測距高精準度、高解析度與可靠度,測距誤差僅5公分左右,量測範圍廣、距離遠,水平360度、垂直30~40度、最遠距離達80~100公尺,而且不易受外在環境光源影響,在強光與黑暗中都能正常運作,受天候、溫度影響小,晴天/雨天、攝氏-10~60度都可運作,且其光源雷射對人眼無害,輕巧又低耗電。
傳統3D雷射如法國廠商Velodyne所發表的Ultra Pack提供旋轉特性,以特殊設計將雷射發射器、接收器與旋轉機構整合在一起,簡化光達內部機構複雜度並縮小體積至約手掌大;Quanergy則發展固態光達產品,採用光學相控陣技術,以二維陣列組成多個光學單元,運用光學相位變化控制雷射光角度,以實現廣角掃描功能,使光達內不再需要旋轉元件,除縮小產品體積,也有助於車輛外觀整體設計。
另外,毫米波雷達被視為另一個關鍵零組件,蔣村杰說明,雷達技術採用高頻電磁震盪運作,透過毫米波傳送,目前汽車雷達使用的標準頻率分為24GHz與77GHz兩種,24GHz用於中、短距離偵測,使用在如盲點偵測(Blind Spot Detection, BSD)、行人偵測、停車輔助等系統;77GHz偵測距離較遠,可應用在像是適應性巡航控制及碰撞警示等應用,其每秒數百億次的高頻震盪可確保測量的準確性。
台灣切入車用電子正對時
汽車發展時間大約百年,已於全球建立起龐大的產業體系,全球移動服務市場每年產值規模5.4兆美元、汽車市場產值則達2.3兆美元、北美汽車市場5,700億美元,所以幾乎所有傳統車廠與ICT廠商,都希望能在共乘服務或自動駕駛系統上分一杯羹,並大舉投入。未來的交通模式趨勢有三種,共享、自動駕駛、電動化等,訴求重點則是清淨能源與分享、私人自主性、無縫接軌的行車服務。
因此,工研院也發展不同面向的計畫與服務,蔣村杰表示,台灣汽車製造產業並不發達,但是資通訊產業則擁有雄厚的實力,因此近年的自駕車風潮為台灣提供很好的機會,工研院資通所也建置「台灣自動駕駛車開放平台」,透過制定自動駕駛一階、二階、三階架構及技術介面規格,連結業界的目標產品與發展藍圖,促進國內下世代產品自主技術開發。並成立「自動駕駛感知次系統產業合作夥伴計畫」,針對車聯網、ADAS、車用感測器等業者將實際需求與產業合作夥伴會員服務內容結合。
 |
| 圖2 NVIDIA技術行銷經理蘇家興�指出,AI將成為自駕車的決策中樞,目前GPU的運算架構平台是主流。 |
現階段實際應用上,工研院也利用ICT技術,在現有的交通環境上與號誌整合,發展一系列整合安全性需求的應用,如十字路口防碰撞警示、左轉防碰撞警示、電子煞車燈警示、前車碰撞警示、盲點碰撞警示、車道偏移警示、eCall服務、自駕車與機車事故感知與通報、行人防碰撞警示、道路施工警示等。希望能從資通訊技術應用的角度,協助台灣產業建立未來發展自動駕駛產業的基礎。
GPU為自駕車運算/處理中樞
自駕車在行駛的過程中必須面對各種不同的突發狀況,並即時做出判斷,所以運算能力又成為新一波發展重點。只是不同於過去的PC與行動通訊時代,AI & IoT時代,影像、圖片的平行運算效能成為重點,專長序列式運算的CPU效能遠遠不及GPU,摩爾定率巧妙的在GPU與NPU上延續。NVIDIA技術行銷經理蘇家興(圖2)指出,AI將成為自駕車的決策中樞,透過車外的訊息蒐集、運算、研判、預測,目前GPU的運算架構平台是主流。
自駕車發展最核心的價值就是安全,根據統計,目前全球每年發生8,200萬起車禍,造成130萬人死亡,經濟損失達5,000億美元,其中大部分是人為疏失,自駕技術成熟可以大幅保障人們生命財產,同時將通勤時間轉變成生產力。蘇家興表示,自駕技術也可以推動共乘/共享經濟的發展,降低交通事故、塞車與車輛排放汙染等問題。
 |
| 圖3 為昇科技研發部資深副總�陳正夫表示,高頻毫米波雷達採用高頻電磁波,比影像感測器與光達相較更不受天候影響。 |
透過人工智慧AI的技術,可以發展環景感測(Surround Perception)、語音辨識與合成(Voice Recognition & Synthesis)、自然語言處理(Natural Language Processing, NLP)、眼球追蹤(Eye Tracking)、頭部姿勢(Head Pose)、手勢辨識(Gesture Recognition)等技術,並將這些技術應用在車門自動啟閉(Automatic Trunk Opening)、視線偵測(Eye Gaze)、分心駕駛(Distracted Driving)、疲勞駕駛(Drowsy Driving)、單車/機車警示(Cyclist Alert)等新功能。
毫米波雷達同樣不可少
前述毫米波雷達是自駕車關鍵感測器之一,未來幾年除了同時搭載短距與中長距雷達之外,使用數量也會增加。為昇科技研發部資深副總陳正夫(圖3)表示,高頻毫米波雷達不是新興的技術,早年用在軍事與航太為主,飛機、船隻、飛彈上都會搭載,近年因為汽車電子化的風潮,成為汽車的關鍵零組件之一,由於其採用高頻電磁波,與光學式的感測器如影像感測器與光達相較,更不受天候影響。
在技術發展上,雷達可以同時接收多個反射訊號,執行多目標偵測,但如果兩個目標距離太近,雷達可能將其視為一個較大的目標而造成誤判,解決的方法就是將頻寬增加,以改善目標物偵測的解析度。過去高頻技術較不成熟,射頻(RF)IC要採用特殊的矽鍺(SiGe)材料製程,現在已經可以採用CMOS製程,晶片尺寸大幅縮小、耗電量降低、成本也同步降低,有利多晶片模組整合成SoC,對於大規模普及化應用非常有幫助。
不過有鑒於高頻毫米波技術在商業化或汽車應用尚未成熟與毫米波雷達本身技術缺陷,陳正夫認為,其中還存在許多設計挑戰,包括:感測資料不易分辨目標形狀、角度判斷有限制、橫向速度估算不夠準確、車道線資訊不足、環境雜訊多、反射/折射訊號都接收導致訊號相對雜亂,遮蔽物材質、距離、形狀與厚度、天線場型等因素。不過,這些限制除透過雷達的技術改善調整之外,也可藉由其他如光學雷達、影像感測器等與之互補,強化感測缺陷。
發展自駕必須導入AI
除了硬體之外,AI是自駕車發展中靈魂的關鍵軟體技術,在資料截取蒐集後需要透過大量的運算,並且在深度學習演算法與神經網路架構底下,產生結論與預測。工研院機械所研究員林哲聰(圖4)說明,維基百科對深度學習(Deep Learning)說明是機器學習的分支,是一種試圖使用包含複雜結構或由多重非線性變換構成的多個處理層對資料進行高層抽象的演算法。事實上,深度學習就是過去神經網路的進階,並透過平行運算將效能大幅提升,使過去的模型變得非常有效。
 |
| 圖4 工研院機械所研究員林哲聰�說明,深度學習就是過去神經網路的進階,並透過平行運算將效能大幅提升。 |
其中在圖形識別方面,最常使用的就是卷積神經網路(Convolutional Neural Network, CNN),基本的網路架構分成幾個部分:影像輸入(Input Image)、卷積/迴旋(Convolution)學習過程萃取特徵,再將數據非線性化(Non-linearity)、空間池化(Spatial Pooling)、資料正規化(Normalization),最後產生特徵映射(Feature Maps)萃取出特徵,如果重覆進行此一流程就會得到更細節的特徵,也就是特徵中的深層特徵,這也是近年深度學習得以突破,網路層數不斷增加,而準確率大幅提升的原因。
理論上只要網路架構沒有出現重大錯誤,在不斷加大網路層數的概念下,都可以得到非常高的準確率。另一種網路叫做生成對抗網路(Generative Adversarial Network, GAN),維基百科解釋是非監督式學習的一種方法,透過讓兩個神經網路相互博弈的方式進行學習。GAN由一個生成網路與一個判別網路組成。兩個網路相互對抗、不斷調整參數,最終目的是使判別網路無法判斷生成網路的輸出結果是否真實。是一種強化學習的方法,以假亂真的AI網路,可以產生任何我們需要卻不存在的結果。
 |
| 圖5 TomTom院士暨定位技術研�發副總賴盈霖表示,HD地圖補足車輛感測與GPS系統不足,讓自駕系統與實際環境一致。 |
另一種常用的神經網路稱為遞歸神經網路(Recurrent Neural Network, RNN),依時序與結構為主可分為時間遞歸神經網路,以及結構遞歸神經網路。林哲聰指出,時間遞歸神經網路的神經元間連接構成矩陣,而結構遞歸神經網路利用相似的神經網路結構遞歸構造更為複雜的深度網路,尤其是長短期記憶模型(Long Short-term Memory, LSTM),最常用在自然語言識別應用。
HD地圖提供精確現地資訊
自駕車不斷發展的結果,許多公正單位也提出不同程度的自駕定義,TomTom院士暨定位技術研發副總賴盈霖(圖5)表示,根據美國汽車工程師協會(SAE)最新的定義(圖6)自駕車從Level 0到Level 5共分成六個層次,Level 0到Level 2是監督駕駛,也就是ADAS的範疇,Level 3到Level 5則是非監督駕駛,進入自動駕駛的範疇,Level 4到Level 5甚至已經沒有方向盤,屬於高度自駕與全自駕。
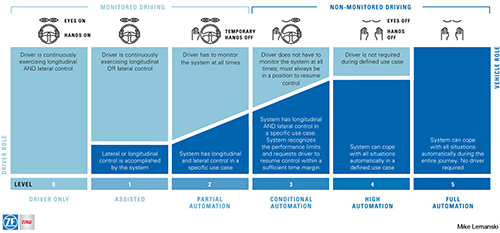 |
| 圖6 美國汽車工程師協會SAE自駕車層次定義 |
資料來源:SAE
而要進入自駕的階段,HD地圖的支援也相當重要,其補足了車輛感測與GPS系統不足,讓自駕系統與實際環境一致。賴盈霖以GPS提供的座標為例說明,地球板塊漂移運動每年約會造成2公分的位移,澳洲大陸更高達20公分,所以HD地圖具有校正GPS座標的功能;另一個是座標轉換,自駕系統的座標與地圖座標不同,必須進行轉換;再者,HD地圖也將清楚判讀告示牌與號誌的位置、形狀、大小、輪廓。
另外,先進駕駛屬性(Advanced Driving Attributes, ADA)可以透過HD地圖提供道路坡度(Gradient)、絕對高度(Absolute Height)、道路曲率(Curvature)、路口處的曲率(Curvature at Junctions)等。自駕車需要清楚知道車道中心線,還有在道路行駛過程所有相關位置的訊息,比如車輛在車道上的位置、距離路緣有多遠,以便提供足夠數據供系統判斷。
 |
| 圖7 瑞薩電子車用事業部市場行銷部經理何吉哲解釋,歐洲NCAP近年也把電子安全功能加入成為評估車輛安全的一環。 |
利用ICT優勢打入汽車產業鏈
汽車產業生態與消費性電子生態大異其趣,汽車產品生命週期長,對於零部件系統的價格敏感度較低,產品穩定度才是重點,也需要長期供貨與後勤支援,就連測試驗證週期也動輒半年到一年。瑞薩電子車用事業部市場行銷部經理何吉哲(圖7)解釋,歐洲的安全撞擊認證機構NCAP(New Car Assessment Programme)近年也把新興的電子安全功能加入成為評估車輛安全的一環,如交通號誌辨識(Traffic Sign Recognition)、車道保持(Lane Keeping)、緊急煞車(Emergency Braking)系統等。
從汽車電子系統架構的角度來觀察,大致分成三類系統(圖8),第一部分視覺就是各類感測器,專門蒐集環境訊息與資料;第二部分大腦負責運算與處理,主要元件就是處理器CPU/GPU;第三部分為延腦主司控制,以MCU為主,一台汽車在各電子模組裡都廣泛搭載MCU,數量至少50~60顆。
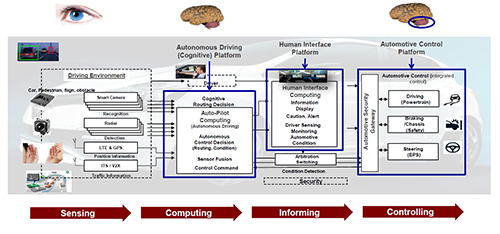 |
| 圖8 汽車電子系統架構分類 |
資料來源:瑞薩電子
汽車電子化是這波產業趨勢的重點,這個大概十年前就興起的議題,這次有自駕車、AI、各式關鍵元件加持,不僅從裡到外也有軟有硬,發展條件較之前更為建全。由於整車與品牌是台廠過去長年的弱勢,從資通訊領域切入相對有機會,除了較易切入的後裝(After Market)市場之外,也應積極與Tier 1車用電子大廠合作,打入前裝市場,尋求正式躋身汽車產業鏈,先打入ADAS相關模組,並持續深化發展未來自駕車更大的商機。